Projects I’ve worked on
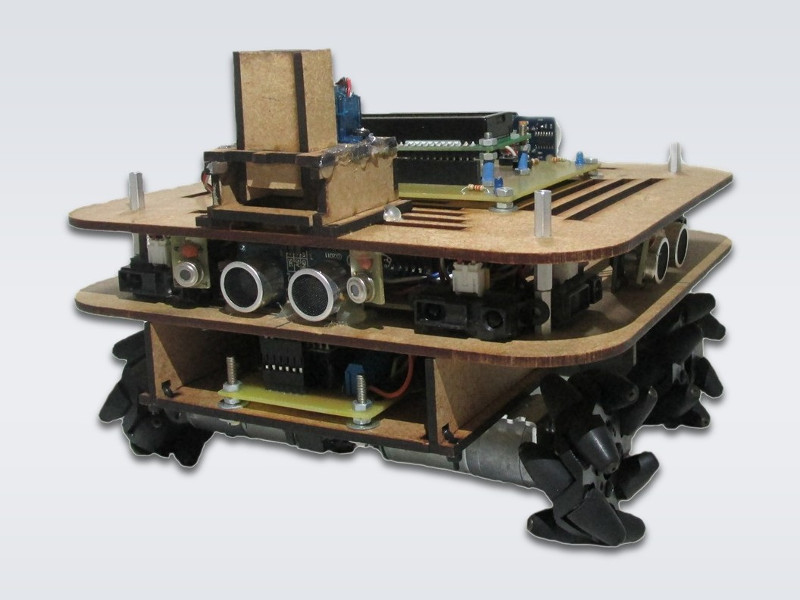
Robocup Rescue Maze
Development of an autonomous robot that explores a maze looking for heat victims
1st Place on LARC
2nd Place on RoboCup Netherlands
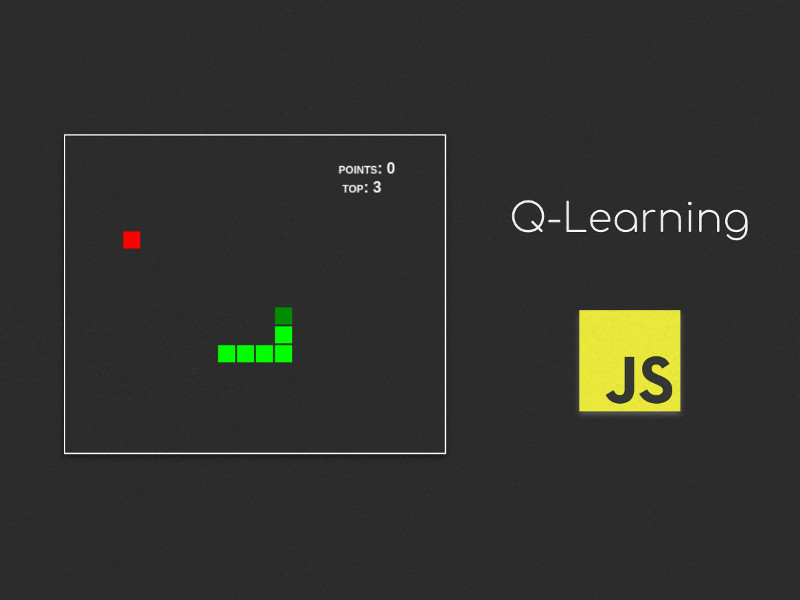
Learn Snake
Implementation of an Artificial Intelligence that learns to play the game Snake and works directly on the browser
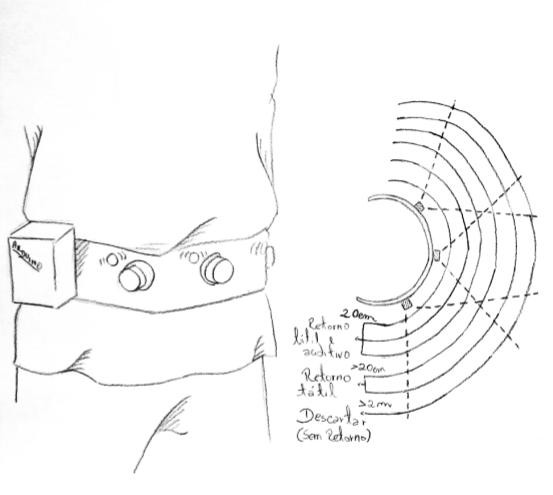
Assistive Belt for Visually Impaired
Assistive Belt intented to aid Visually Impaired people in their mobility
Some things I’ve worked with
Summary
Currently a Software Developer, working mainly with Node.js and Vue.
Formerly undergraduate student in Control and Automation Engineering at Federal University of Minas Gerais (UFMG ).
Participation in international robotics competitions (LARC and RoboCup), acting mainly in the development of autonomous robots, microcontroller programming and prototyping circuits.
Experience as a Scientific Initiation Scholar in the field of cooperative robotics.
Timeline
2018
- Translated the game Crowds, by Nicky Case, to Portuguese
- Talked about Reinforcement Learning on BH-TEC
- Co-authored a conference paper about Multi-Robot Coverage Algorithm in VR
- Started working as a Software Developer at Newatt
2017
- 2nd Place on AbbVie Hackathon
- Talked about IoT (Internet of Things) on BH-TEC
- Scientific Initiation Scholar in the field of cooperative robotics

In the Campus Party we developed a mockup of an app to help the citizens keep track of their medical appointments and were awarded the 2nd place on the AbbVie Hackathon.
Taking place in the Technological Park of Belo Horizonte, I presented a lecture about some low-cost platforms to develop to the Internet of Things. Amongst the presented topics: Raspberry Pi, ESP8266, MQTT, LORA Network, PlatformIO, Android Things.
2016
- 9th Place on RoboCup Germany

For the Rescue Maze competition, we developed a robot capable of travelling a maze and returning, in an optimal way, to its original point. For that, was used Tremaux to explore the labirinth and A* Algorithm to compute the optimal way.
2015
- 1st Place on Latin American Robotics Competition
We were three-time champion in consecutive years for the Rescue Maze on the Latin American Competition.
2014
- 1st Place on Latin American Robotics Competition
- 3rd Place on RoboCup Brazil
- Development of Assistive Belt for Visually Impaired

Taking place in São Paulo, we presented in the USP Science Fair (FEBRACE) an Assistive Belt intented to aid Visually Impaired people in their mobility. The device had three ultrasonics sensors to measure the environment and return haptic feedback to the user.
In the RoboCup, we developed a robot capable of travelling a maze in the Rescue Maze competition and awarded the 3rd Place in the worldwide competition. To achieve the objective, the Tremaux algorithm was used.
2013
- 1st Place on Latin American Robotics Competition
- 2nd Place on RoboCup Netherlands

In the Rescue Maze competition, an autonomous robot was developed in order to travel an entire maze looking for heat victims attached to the wall. After travelling the entire maze, the robot receives a bonus if it goes back to its start position. To travel the maze, the Tremaux algorithm was used and the actual position of the robot was saved in a Cartesian system.
2012
- 5th Place on RoboCup Mexico
- Scientific Initiation Scholar Jr. in the field of educational robotics
In Mexico, we participated in a competition in which we should develop a robot capable of following a line and avoiding obstacles. To follow the line, the robot read the environment with light sensors and applied a simplified PID controller to keep the robot centered in the line. The hardware was developed using the microcontroller Arduino.
Published Papers
Voronoi Multi-Robot Coverage Control in non-convex environments with Human Interaction in Virtual Reality (2018)
Coelho Figueiredo, Lucas; Lelis de Carvalho, Italo; Cunha de Araújo Pimenta, Luciano.